광학계

Boller & Chivens 24인치(61cm) 반사망원경
- 광학계유효초점 f/13.5, 리치-크레티안 형
- 주 경61cm 유효직경, f/3.5
- 부 경18cm 유효직경, 쌍곡면
- 관측시야1도
- 보조망원경지름 10cm, f/8.5, 관측시야 2도
가대
- 마운트형식적도의식
- 구동속도1.5 도/초 Slew, 3 분/초 Set, 1 초/sec Guide)
- 구동방법컴퓨터제어 및 핸드 패들
- 위치표시다이얼 표시계(우측 그림의 왼쪽부터 적경, 시간각, 적위)

61cm 망원경 가대
망원경과 관측기기 제어
61cm 망원경은 제어 PC, 망원경, 컨트롤러 사이의 통신을 이용해 제어한다. 이를 간략히 그림으로 나타내면 아래와 같다.
관측자는 한인우가 개발한 TCS(Telescope Control System) 프로그램을 이용하여 망원경을 구동 및 제어하고, 차상목이 개발한 CCD 제어프로그램을 이용하여 관측한다. 구동부에는 망원경의 상태 확인을 위한 Home, Pre-load 등의 감지 센서와 망원경 보호를 위한 적경, 적위 등의 이동 제한 센서가 부착되어 있다. 따라서 관측이 가능한 천체의 고도는 25도 ~ 90도이고, 시간각은 정남 기준으로 ±4.5 hour이다. 망원경의 초점거리는 부경을 움직여 조정한다.
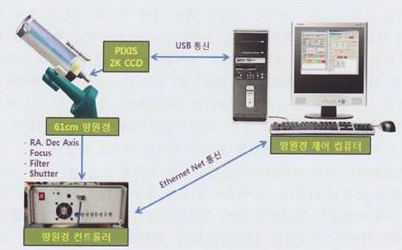
망원경 시스템 구성도
망원경의 지향 정밀도와 시각 정밀도
망원경의 이동방식은 [적경, 적위 입력], [고도, 방위각 입력], [적경, 적위 offset 입력], [고도, 방위각 offset 입력]의 4가지 방식이 있다. Offset 값은 망원경 이동 전과 후, 두 지점 사이의 각거리를 말하고 적경, 적위 좌표는 J2000.0 Epoch을 입력하여야 한다. 좌표입력은 파일로 입력받을 수 없고 수기로 입력하여야 한다. 관측 타겟은 입력된 좌표로 망원경 이동 후 관측 영상의 ± 5분각 안에 들어온다.
관측 시작에 앞서 시각동기 프로그램인 UTCk를 이용해 컴퓨터의 시각을 1/100단위까지 동기화 시킨 후 관측 프로그램을 구동시키며, 관측 상태를 최적화하기 위해 관측 중간에는 동기화를 사용하지 않는다. FITS의 헤더에 입력되는 시각정보 역시 이 방식으로 설정된 OS 시각에 의해 계산된다. 다만 헤더 파일에 입력된 UT의 시각정보는 관측 중간시점(노출시작시간+노출시간/2)을 시각(hour) 단위로 저장하기 때문에 시각 분해능이 3.6 ms인 시각 정보를 얻을 수 있다.
돔
- 형 태반구형
- 개폐형태부분개폐 (상·하부 슬릿)
- 구동방식컨트롤 버튼 (전자식-반자동)
- 위치표시소형 CCTV 카메라(초저도: 주야 위치확인)

돔